
Как подключить 2 скорость на тельфере
Подключение 2-х скоростного электродвигателя | Автор темы: Степан
есть один электромотор 2-х скоростной 3кв.
Любовь Маркировка две звезды-треугольник означает, что частота вращения данной машины меняется переключением обмоток с треугольника на двойную звезду. Треугольник - 3000 оборотов, двойная звезда - 1500. Мощность указана разной, потому как одинаковой при одних габаритах но разных частотах вращения она быть не может.
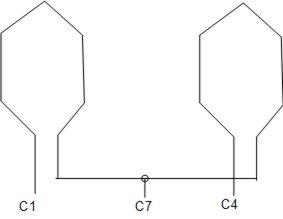
На рисунке упрощённо показана схема одной обмотки. При соединении в треугольник соединяются с1-с6, с2-с4, с3-с5, птание подаётся на эти точки.
При соединении двойной звездой все эти концы объединяются, питание подаётся на точки с7, с8, с9.
Если выводов всего шесть, значит треугольник уже собран внутри машины, переключение осуществляется перебросом питания и закорачиванием трёх выводов.
Евгений как показано, так и надо подключать.
Яна Нет, это по сути два в одном, два режима не совместимы!!!! Но возможное мгновенное переключение с одной скорости на другую без остановки, и без реверса, то есть в одном направлении....
Мария Здесь пошебурши: https://electrotransport.ru/ussr/index.php?topic=16727.0
Раиса Бред написан! И вот почему: Мощность у вас в киловольтах!
+ 1 тельфер, запуск.






Два двигателя на одну ось Y. | Автор темы: Candria
Возникла необходимость на одну ось Y установить два шаговика. Можно ли к Ramps подключать так же как на рисунке к Melzi подключены двигатели на оси Z? И попутно, как подключать двигатели с расцветкой проводов Зеленый-Красный-Синий-Желтый?

Ильдар (Chinmaya) Думаю можно
Афанасий (Rajalakshmi) и чтобы вращались в разные стороны.
Евгений (Dilwen) подключить можно, главное не спалить драйвер. 2 движка будут жрать в 2 раза больше тока. разность направлений достигается экспериментально. перекидыванием проводов
Ильдар (Chinmaya) На рампсе оси z моторчики параллельно сидят
Афанасий (Rajalakshmi) В чем тогда разница подключений на картинке выше и на этой?

Афанасий (Rajalakshmi) Кроме того что обмотки последовательно и параллельно... как это влияет на драйвер?
Ильдар (Chinmaya) Афонасий, вырастет нагрузка в 2 раза
Афанасий (Rajalakshmi) Ильдар, это ежу понятно) при обоих способах подключений одинаково?
Ильдар (Chinmaya) Не могу сказать за мелзу
Сергей (Kumud) можно просто на каждый мотор по драйверу со своей обвязкой поставить и управлять теми же сигналами у меня по z так сделано плата gen7
Евгений (Dilwen) Афонасий, на мой взгляд последовательное подключение хуже. увеличивается сопротивление обмотки, индуктивность, что вносит свою лепту в работу движков. параллельное подключение ничего кроме нагрузки на драйвер не меняет.
Афанасий (Rajalakshmi) Сергей, а в прошивке нельзя назначить на ось Y драйвер для второго экструдера?
Сергей (Kumud) Афонасий, думаю что можно если есть свободный в файле config.h надо найти чтото типо этого #define E_STEP_PIN DIO27
#define E_DIR_PIN DIO26
#define E_MIN_PIN DIO1
и поменять DIO на нужные ножки от Y.
Только прошивка должна поддерживать 2 экструдера иначе работать не будет
Афанасий (Rajalakshmi) Сергей, а разве не наоборот Е_1 (второй экструдер) нужно заменить на Y или Y_1 а пины оставить прежними ведь на эти пины подключен драйвер для второго экструдера? Если есть подробная инструкция по конфигурации прошивки марлин, поделитесь
Афанасий (Rajalakshmi) в pins.h нашел такие строки в которых на пятый драйвер уже прописаны Y2, Z2 и E2.
#define X_STEP_PIN 54
#define X_DIR_PIN 55
#define X_ENABLE_PIN 38
#define X_MIN_PIN 3
#define X_MAX_PIN 2
#define Y_STEP_PIN 60
#define Y_DIR_PIN 61
#define Y_ENABLE_PIN 56
#define Y_MIN_PIN 14
#define Y_MAX_PIN 15
#define Z_STEP_PIN 46
#define Z_DIR_PIN 48
#define Z_ENABLE_PIN 62
#define Z_MIN_PIN 18
#define Z_MAX_PIN 19
#define Y2_STEP_PIN 36
#define Y2_DIR_PIN 34
#define Y2_ENABLE_PIN 30
#define Z2_STEP_PIN 36
#define Z2_DIR_PIN 34
#define Z2_ENABLE_PIN 30
#define E0_STEP_PIN 26
#define E0_DIR_PIN 28
#define E0_ENABLE_PIN 24
#define E1_STEP_PIN 36
#define E1_DIR_PIN 34
#define E1_ENABLE_PIN 30
Вопрос: где включается Y2?
Сергей (Kumud) Афонасий, у меня другая прошивка инструкции на марлин нет, посмотрел марлин в ней пины настраиваются в файле pins.h для разных плат и микросхем. нужно править в том месте где описываются пины для нужной платы см с верху пинов #if MB(ULTIMAKER)
какая плата выбрана можно посмотреть в файле configuration.h строка #define MOTHERBOARD BOARD_ULTIMAKER
если там уже есть Y2 то скорее всего нечего включать не нужно, надо только заменить пины на нужные, если нет то попробовать добавить самому 3 строчки.
#define Y2_STEP_PIN 36
#define Y2_DIR_PIN 34
#define Y2_ENABLE_PIN 30
цифры после пин поменять на нужные ножки свободного драйвера (e1). В строчках ненужной оси (e1) поставить -1 или просто удалить их)
рин "-1" - ЗНАЧИТ выключино.
Ольга (Caliopa) Сергей, Афонасий вот строчки из configuration_adv.h
// Same again but for Y Axis.
#define Y_DUAL_STEPPER_DRIVERS //метка2
Я тут разкоментил строку все заработало на оси Е1 дублируется ось Y, но она не калибруется с осями X, Y, Z, E0
Ольга (Caliopa) Афонасий, #define Y_DUAL_STEPPER_DRIVERS //метка2
вот где включить. Но как дальше калибровать, вот вопрос!
#define DEFAULT_AXIS_STEPS_PER_UNIT {80, 80, 4000, 500} если значения отличны от 80 то скорости разнятся!


